Foveated Path Tracing with Fast Reconstruction and Efficient Sample Distribution
2020, Koskela, M., Doctoral dissertation, Tampere University.
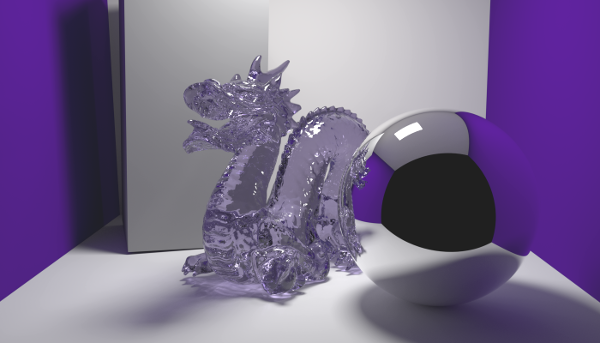
Abstract: Photo-realistic offline rendering is currently done with path tracing, because it naturally produces many real-life light effects such as reflections, refractions and caustics. These effects are hard to achieve with other rendering techniques. However, path tracing in real time is complicated due to its high computational demand. Therefore, current real-time path tracing systems can only generate very noisy estimate of the final frame, which is then denoised with a post-processing reconstruction filter.
A path tracing-based rendering system capable of filling the high resolution in the low latency requirements of mixed reality devices would generate a very immersive user experience. One possible solution for fulfilling these requirements could be foveated path tracing, wherein the rendering resolution is reduced in the periphery of the human visual system. The key challenge is that the foveated path tracing in the periphery is both sparse and noisy, placing high demands on the reconstruction filter.
This thesis proposes the first regression-based reconstruction filter for path tracing that runs in real time. The filter is designed for highly noisy one sample per pixel inputs. The fast execution is accomplished with blockwise processing and fast implementation of the regression. In addition, a novel Visual-Polar coordinate space which distributes the samples according to the contrast sensitivity model of the human visual system is proposed. The specialty of Visual-Polar space is that it reduces both path tracing and reconstruction work because both of them can be done with smaller resolution. These techniques enable a working prototype of a foveated path tracing system and may work as a stepping stone towards wider commercial adoption of photo-realistic real-time path tracing.